Industrial level teaching application of six axis robotic arm

Product Introduction
Ethernet communication
·Based on Ethernet communication, micro robots provide a scalable distributed control system,
It is also a tool for Ethernet related training.
Industrial Robot Design
·Referring to the design of general industrial 6-axis articulated robots, the construction method of micro robots is the same. Its bare metal mechanical structure is easy to learn about the structure of industrial robots
Open development environment
·The micro robot comes with a practical tool that allows for direct operation of the robot. The Windows platform also provides a robot control API, allowing users to develop any type of robot application using its openness
main features
-Based on Ethernet
-Compact design
-Suitable for the education industry
-Standard 6-axis articulated robot
-Control cabinet
-Robot Control API
-Joint type 6-axis robot
-Open Robot Controller
Product specifications
robot
freedom: six
Payload: 1kg
Drive system: Ethernet closed-loop stepper
Position feedback: incremental encoder
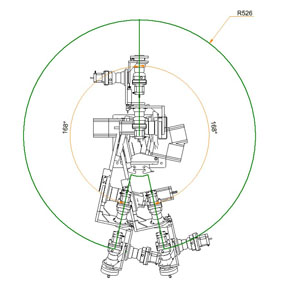
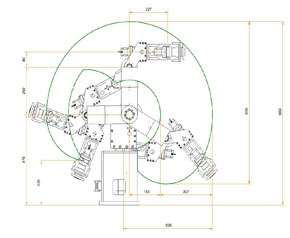
Scope of operation: 590mm (maximum)
- J1: ±175°
- J2: + 110°~ -92°
- J3: + 63°~ -153°
- J4: ±175°
- J5: ±92°
- J6: ±180°
Reproducibility: ±0.12mm
Weight: arm 30kg
Input voltage: single-phase 100~240Vac
controller
DI/O: 15 ch DI/16-ch DO (DB37 connector)
1 x Intel ® GbE LAN port 1 x VGA
2 x USB 2.0 (external)
1 x USB 3.0, 1 x USB 2.0 (inside the control cabinet)
1 x Emergency braking end
Weight: Control cabinet 20kg
software
NexGRC runtime (robot controlled runtime)
NexMotion studio (configuration program) standard robot motion control function
Supports C \ C++, C # and VB. Net User Programming
OS: WES7
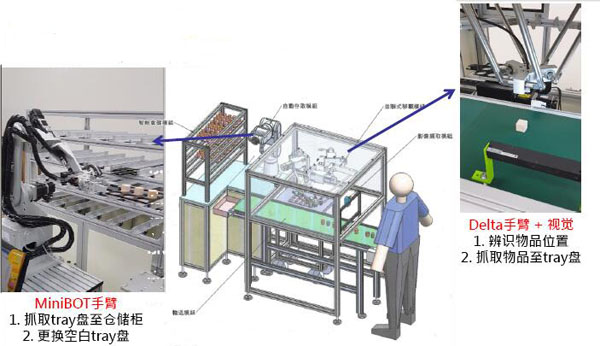
- 智慧产线示范线
Product Center | Solution | News | Download | About Us |
| Network Security | Customized Services | Company Profile | ||
| Data Acquisition | Strategic Cooperation | Contact Us | ||
| Rail Transit | Data Download | Honor | ||
| Server | | Our History | ||
| PCIe network card | Attract Talents |
Beijing Gemotech Intelligent Technology Co., Ltd.
Email:marketing@gemotech.cn
Phone:010-81909399
;){kind=link}
;){kind=link}