地址:北京市昌平区回龙观北京国际信息产业基地发展路1号院(集智达大厦5层)
邮编:102206
电话:010-81909399
传真:010-81909456
网址:http://www.gemotech.cn
E-mail:marketing@gemotech.cn

以太网通讯
· 基于标准的以太网通讯,微型机器人提供了一个可扩展的分布式控制系统,
它也是以太网相关培训的一个很好的工具。
工业机器人设计
· 参照一般工业的6轴铰接式机器人设计,微型机器人的建造方式与此相同。它的裸机机械结构易于对工业机器人的结构的学习
开放的开发环境
· 微型机器人附带一个实用工具,可以直接操作机器人。Windows平台还提供机器人控制API,用户可以利用其开放性来开发任意类型的机器人应用程序。
主要特点
- 基于以太网
- 设计紧凑
- 适用于教育行业
- 标准6轴铰接式机器人
- 控制柜
- 机器人控制API
- 关节型6轴机器人
- 开放式机器人控制器
产品规格
机器手臂
自由度: 6
Payload: 1kg
驱动系统: 以太网闭环步进器
位置反馈: 增量编码器
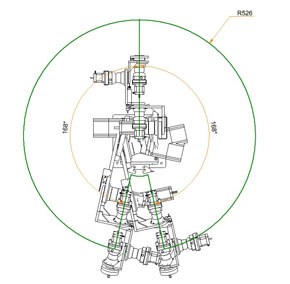
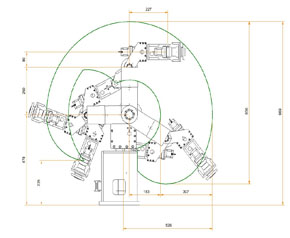
操作范围: 590mm (maximum)
- J1: ±175°
- J2: +110°~ -92°
- J3: +63°~ -153°
- J4: ±175°
- J5: ±92°
- J6: ±180°
再现性: ±0.12mm
重量: arm 30kg
输入电压: 单相 100~240Vac
控制器
DI/O: 15-ch DI/16-ch DO (DB37 接头)
1 x Intel® GbE LAN port 1 x VGA
2 x USB 2.0 (外置)
1 x USB 3.0, 1 x USB 2.0 (控制柜内)
1 x 紧急制动端
重量: 控制柜 20kg
软件
NexGRC 运行时(机器人控制运行时)
NexMotion studio (配置程序)标准的机器人动作控制功能
支持C\C++, C# 和 VB.Net用户编程
OS: WES7
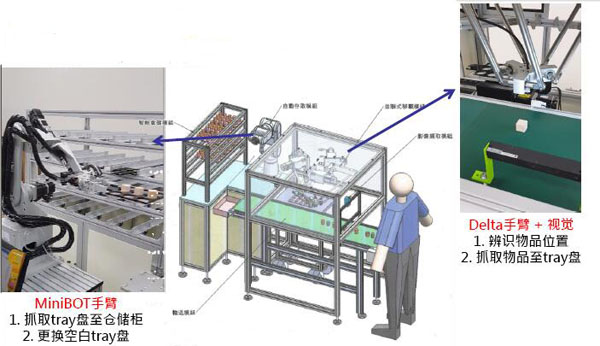
MiniBOT应用客户

台湾 中科机器人自造基地
- 机器人培训 机器人原理、操作、视觉应用 - 机器人竞赛(搭配Nvidia AI)

- 智慧产线示范线